Участники встречи обсудили вопросы реализации книжной продукции КБНЦ РАН, в частности, подключение таргетированной рекламы при выкладывании постов в социальных сетях (“Вконтакте”), с целью увеличения потенциальной целевой аудитории. В рамках проекта Howtosayve ученые подробно остановились на процессе подключения платёжной системы для запуска и дальнейшем продвижении проекта. В работе семинара приняли участие: А.Х. Бароков, младший научный сотрудник […]
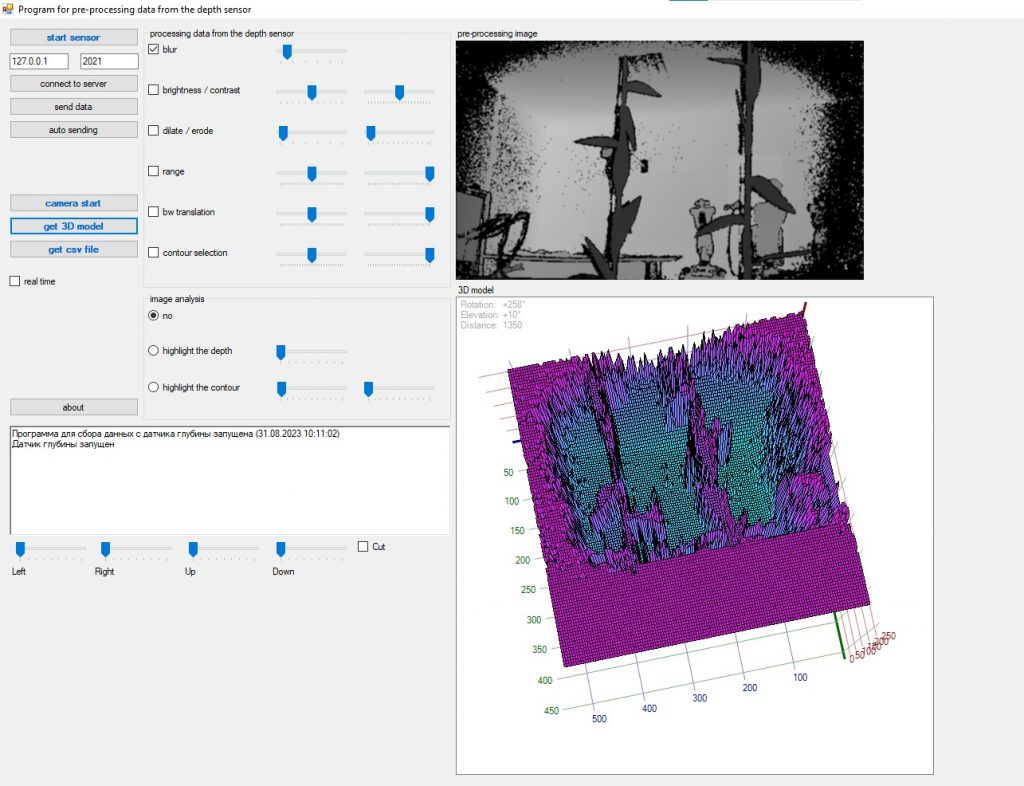
В рамках археологических раскопок на территории грунтового могильника «Заюково-3» были проведены испытательные запуски роботизированной системы сбора данных для археологии. Эта система представляет собой три опоры, на которых, за счет троссового привода, закреплена подвижная платформа для сканирования процесса раскопок. На платформе установлены датчики и камера, которые позволяют строить трехмерную модель каждого слоя раскопки и прикреплять к […]
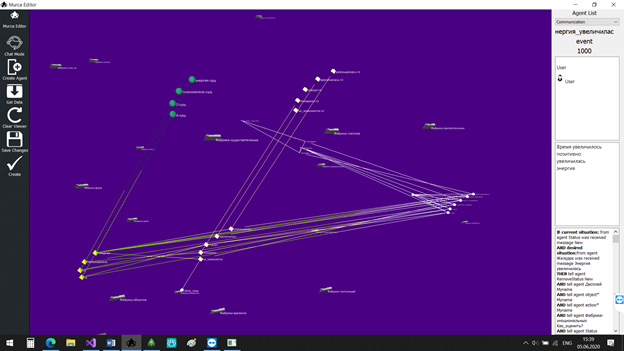
В рамках семинара команда разработчиков представила новую версию программы для редактирования мультиагентных нейрокогнитивных архитектур. В программе доработан интерфейс и реализована более удобная система поиска акторов. Это позволит упростить работу инженеров по данным и других участников разработки. Кроме того, ведутся работы по реализации трехмерного режима редактирования акторов в программе. В ходе семинара обсудили дальнейшую работу по […]
Участники встречи обсудили «Сервис интеллектуального управления роботизированными парковочными местами», тестирование функций робота-парковщика, рассмотрели возможные варианты эксплуатации «Парковщика». Кроме того, в ходе семинара подробно разобрали этапы работы по поставленным задачам, в частности, сервис уведомлений и достигнутые результаты. Перед собравшимися были поставлены следующие задачи – рассмотреть аналогичные парковочные места в мегаполисах, с учетом существующих счетчиков на них и иных механизмов, для обеспечения требуемого функционала на вышеупомянутых […]
В рамках семинара обсудили проект «Сервис интеллектуального управления роботизированными парковочными местами», тестирование функций робота-парковщика. Участники семинара рассмотрели этапы работы и, в частности, разработку сервиса уведомлений по «Парковщику» и достигнутые результаты в этом направлении, а также режим регистрации и способы подключения к сети сервисов различных парковок. Кроме того, участники семинара подробно разобрали выявление активных участников проводимых «Парковщиком» операций, автоматическое подключение робота к Wi-Fi […]
Участники встречи обсудили вопросы формирования документации ЦКП, изучили актуальные цены на оказание ряда услуг на примере других аккредитованных ЦКП в РФ. В ходе семинара обсудили предстоящие испытания агро-дрона. В работе совещания принимали участие: А.Х. Бороков, младший научный сотрудник лаборатории «Модели и методы развития и внедрения инновационных проектов» ИЦ КБНЦ РАН, А.Х. Думанова, заведующая лабораторией «Маркетинг инновационных разработок» ИЦ КБНЦ […]
Встречу посвятили обсуждению мультиагентных архитектур, применяемых для навигации и управления системой опрыскивания автономного робота для активной защиты растений. На данный момент разработчики реализовали дополнительные возможности для определения препятствий и построения маршрута среди посевов. Ведутся работы по усовершенствованию алгоритма распознавания препятствия и наведения включения системы опрыскивания. Кроме того, была продемонстрирована новая версия программы, позволяющая получать информацию […]