Участники семинара изучили и обсудили возникшие проблемы в процессе промежуточного эксперимента робота-парковщика, предложили идеи для их устранения. Кроме того, была поставлена задача по налаживанию работы в беспрерывном режиме. Присутствующие обсудили способы оптимизации процесса, улучшения программного обеспечения и обновления оборудования для повышения эффективности и надежности работы. Сформулированы конкретные шаги и планы действий для дальнейшего улучшения функционирования […]
Подробнее
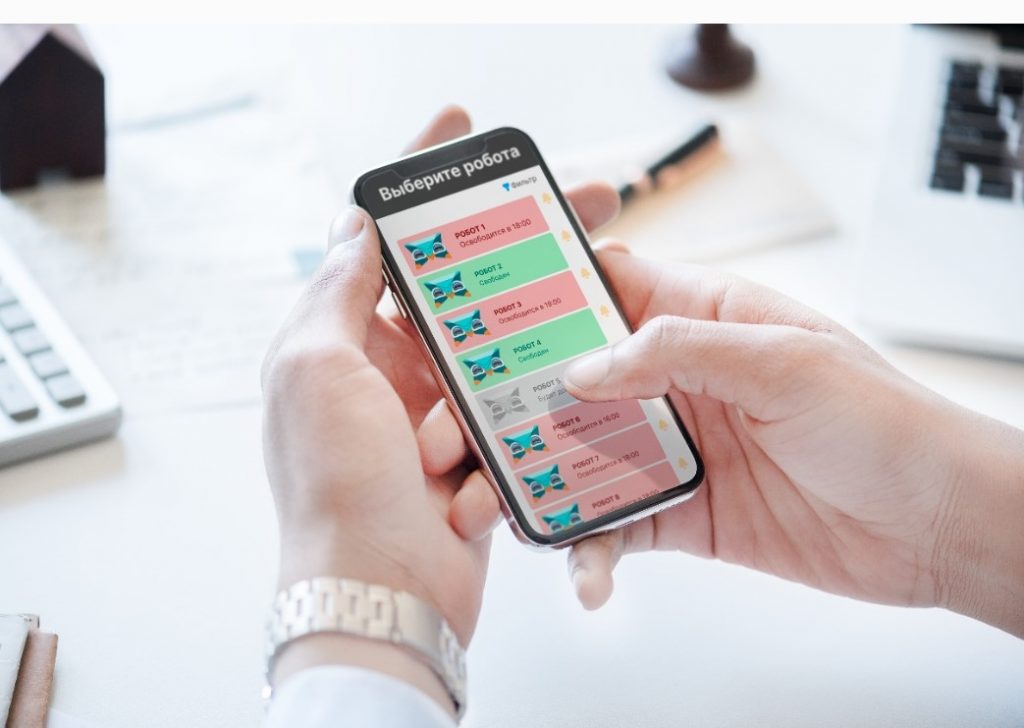
На семинаре обсуждались различные технологические подходы и возможности улучшения функционирования робота-парковщика, включая оптимизацию его работы. Одним из предложенных вариантов была идея предоставления пользователю QR-кода, который будет записываться в базу данных серийных номеров на сервере. Это позволит автоматизировать процесс идентификации автомобилей при въезде на парковку и упростить взаимодействие с роботом-парковщиком. Участники обсудили технические и организационные аспекты […]
Подробнее
10-12 декабря в Краснодаре заведующий лабораторией МСиБ КБНЦ РАН Курашев Ж.Х. принял участие в качестве оппонента на защите докторской диссертации “Разработка инновационного способа получения и трансплантации эмбрионов” в КубГАУ. Увеличение производства молока для населения является стратегической задачей животноводства. Разработанные процедуры биотехнологии будут применяться для повышения эффективности разведения сельскохозяйственных животных, сохранения генетических ресурсов и улучшения качества […]
Подробнее
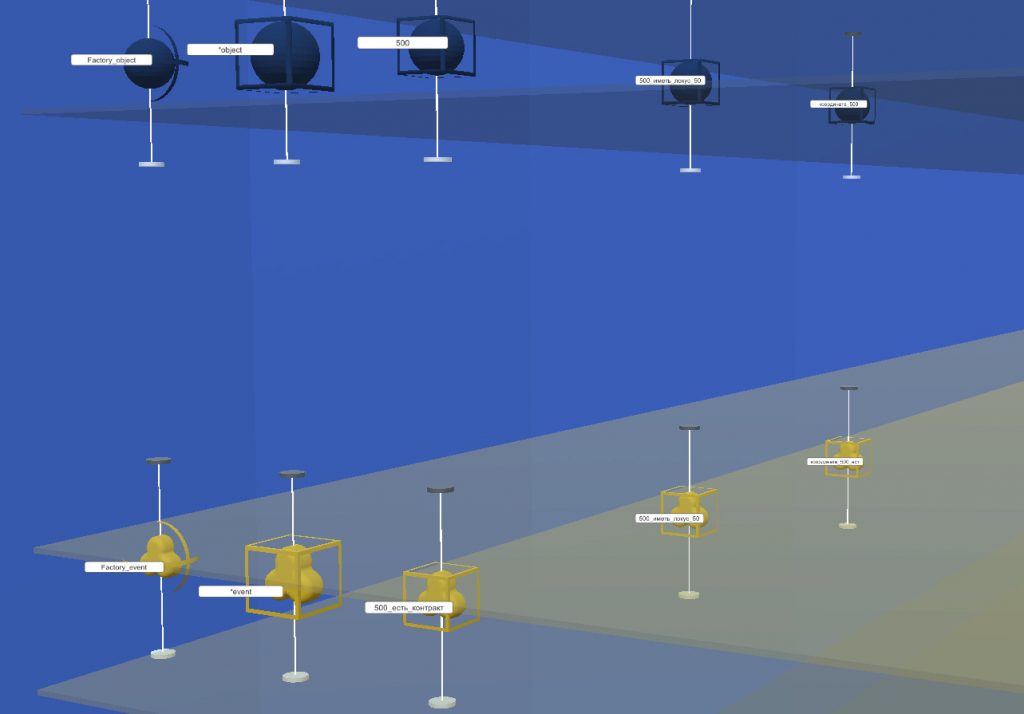
Семинар был посвящён исправлению недочётов в программе для визуализации и редактирования мултиагентных нейрокогнитивных архитектур. В частности, разработчики вносят исправления в алгоритм создания новых акторов. В работе семинара приняли участие: М.А. Абазоков, младший научный сотрудник лаборатории «Нейрокогнитивные автономные интеллектуальные системы» КБНЦ РАН, А.И. Бозиев, младший научный сотрудник лаборатории «Нейрокогнитивные автономные интеллектуальные системы» КБНЦ РАН, С.М. Канкулов, младший научный […]
Подробнее
В рамках встречи была обсуждена статистика просмотров и лайков постов в социальной сети VK, направленных на продвижение книжной продукции КБНЦ РАН. Отчет представила ответственная за социальные сети, младший научный сотрудник лаборатории «Модели и методы развития и внедрения инновационных проектов» ИЦ КБНЦ РАН Мариям Хаджиева. Научный сотрудник лаборатории «Модели и методы развития и внедрения инновационных проектов» ИЦ […]
Подробнее
В ходе встречи участники обсудили промежуточные результаты тестирования робота-парковщика. Был проведен анализ для улучшения аппаратной части и программного обеспечения с целью повышения точности и эффективности его работы, а также уровня взаимодействия с сервером. Кроме того, на семинаре были представлены текущие проекты в области робототехники. Участники поделились своими достижениями, обсудили возникающие проблемы, обменялись идеями. В работе […]
Подробнее
Коллектив КБНЦ РАН поздравляет Гумара Хасановича Батова с заслуженным признанием его труда и желает новых побед на профессиональном поприще!
Подробнее
В канун Нового года заместитель генерального директора КБНЦ РАН Казим Уянаев вручил благодарности сотрудникам Центра за многолетний добросовестный труд, ответственное отношение к работе и активную жизненную позицию. Коллектив КБНЦ РАН поздравляет коллег и желает им новых свершений и успехов в работе!
Подробнее
По результатам голосования директором Института сельского хозяйства КБНЦ РАН был переизбран Жекамухов Магомед Хасанович. Решение принято единогласно и является признанием профессиональных достижений и лидерских качеств кандидата. Жекамухов Магомед Хасанович окончил Кабардино-Балкарский аграрный институт, имеет ученую степень кандидата сельскохозяйственных наук. Является автором 64 научных работ, многие из которых индексируются в международных базах научного цитирования Scopus и […]
Подробнее
По итогам Ученого совета были утверждены темы диссертаций на соискание ученой степени кандидата наук, аспирантов и соискателей НОЦ КБНЦ. Также был обсужден и рекомендован к изданию сборник научных работ «Открытия и успехи кавказской археологии», посвященный различным аспектам археологии эпохи раннего железного века – раннего средневековья на территории Северного Кавказа. Сборник является плодом совместной работы отдела […]
Подробнее