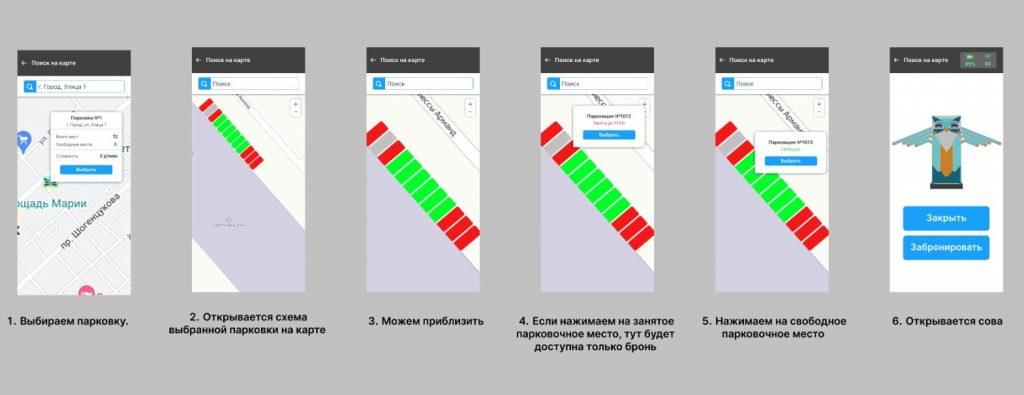
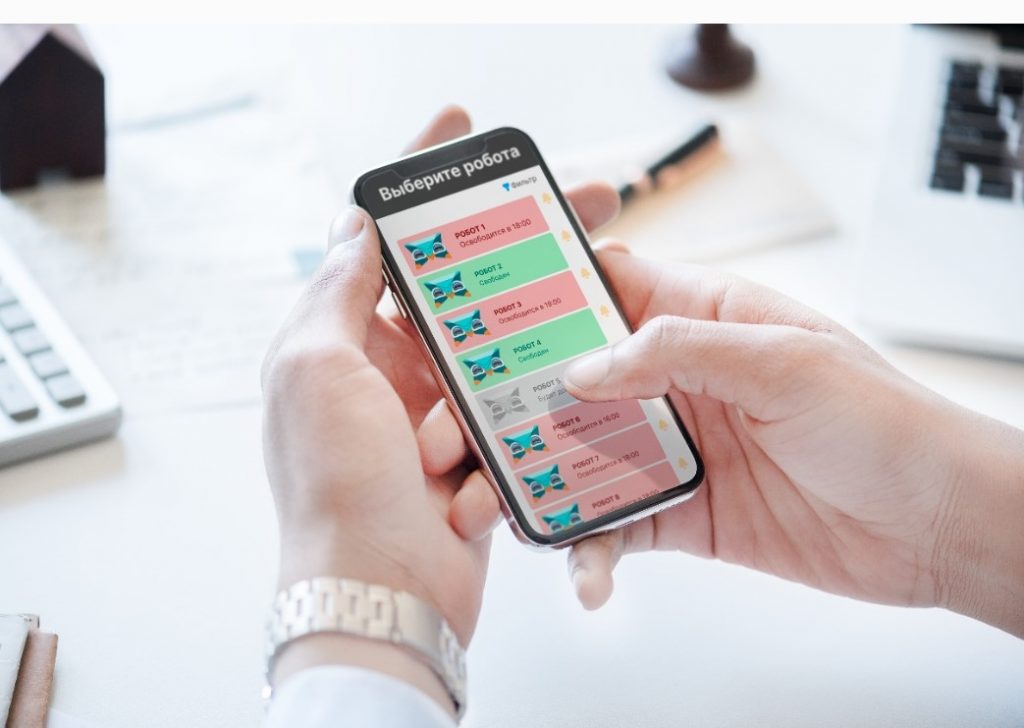
На семинаре специалисты рассмотрели необходимость внесения изменений и корректировок в программу робота парковщика. Они обсудили результаты тестирования данного приложения и проведенные мероприятия для улучшения его работы. Особое внимание было уделено настройке серверов для обеспечения совместимости с различными программами. Было принято решение остановиться на использовании баг-трекера для отслеживания проблем и ошибок в программе робота-парковщика. Участники семинара […]
Подробнее
Участники семинара обсудили результаты тестирования функционала приложения робота-парковщика. Поставлена задача провести мероприятия для улучшения его работы. Кроме того, на семинаре рассмотрен вопрос совместимости серверов для работы различных программ. Специалисты выявляют расхождения серверов, необходимые расширения и возможные решения для обеспечения совместимости и эффективной работы программ. В работе семинара участие приняли: М.И. Анчеков, заместитель генерального директора КБНЦ […]
Подробнее
На семинаре А.Х.Аттаев, заведующий отделом УСТ ИПМА КБНЦ РАН, к.ф.м.н. презентовал доклад на тему “Характеристические задачи для нагруженных гиперболических уравнений второго порядка”. В рамках исследования были изучены три уравнения в частных производных, для которых были найдены решения классических задач Гурса. В зависимости от вида нагрузки, полученные решения привели к интегральным уравнениям Вольтерра или Фредгольма. Результаты […]
Подробнее
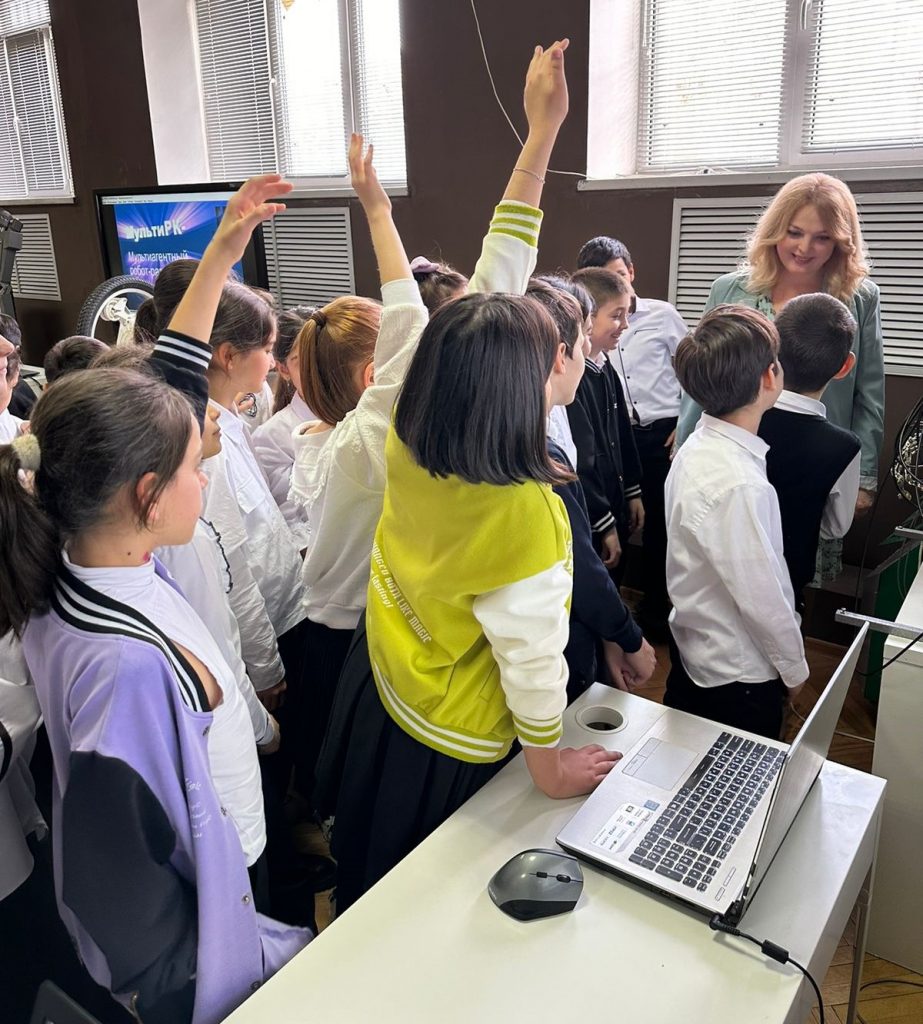
В рамках мероприятий, посвященных 300-летию Российской академии наук, была организована выставка научных достижений КБНЦ РАН для школьников. Молодые участники имели уникальную возможность ознакомиться с экспозицией, демонстрирующей передовые научные и технологические достижения. Заведующая ИЦ КБНЦ РАН, Оксана Загазежева, подробно рассказала о текущих исследованиях, новейших технологиях и открытиях, которые способствуют прогрессу науки и развитию человечества.
Подробнее
В рамках семинара были обсуждены следующие вопросы: – Разработка учебного плана для курсов ДПО по обучению на оператора БПЛА – План продвижения книжной продукции КБНЦ РАН на первое полугодие 2024 года – Организация тестирования сервиса многоязычных переводов и подготовка отчёта по его результатам – Предложение сотрудников ИЦ подтем для НИР на следующие 3 года Участники […]
Подробнее
8 февраля 2024 г. в Центральной библиотеке г.о. Нальчик прошел Круглый стол «Блокада и оборона Ленинграда: исторический подвиг народа в борьбе за победу в Великой Отечественной войне», приуроченный к 80-летию полного снятия блокады Ленинграда. Мероприятие организовано и проведено сектором новейшей истории ИГИ КБНЦ РАН совместно с Управлением по молодежной политике администрации г.о. Нальчик. Спикером Круглого […]
Подробнее
9 февраля 2024 года в актовом зале КБНЦ РАН состоялся учебно-методологический семинар на тему «Нормативно-правовые основы подготовки диссертаций на соискание ученой степени кандидата наук». Основным спикером выступил заместитель генерального директора КБНЦ РАН по научной работе доктор исторических наук Алексей Абазов, модератором – заведующая отделом подготовки кадров высшей квалификации Научно-образовательного центра КБНЦ РАН кандидат физико-математических наук […]
Подробнее
В Кабардино-Балкарском научном центре Российской Академии наук (КБНЦ РАН) состоялось торжественное заседание, посвященное 300-летию РАН, сообщил корреспондент РИА «Кабардино-Балкария». Началось мероприятие с экскурсии, которую генеральный директор КБНЦ РАН Залимхан Нагоев провел для гостей по выставке научных и инновационных разработок учреждений РАН, расположенных в Кабардино-Балкарии. З. Нагоев рассказал гостям, среди которых были представители законодательной и исполнительной […]
Подробнее
В мероприятии приняли участие Председатель Парламента КБР Татьяна Егорова, Руководитель Главы Администрации КБР Мухамед Кодзоков, заместитель Председателя Правительства КБР Марат Хубиев, Уполномоченный по правам человека в КБР Борис Зумакулов, доктор технических наук, профессор, академик РАЕН, научный руководитель Федерального научного центра «Кабардино-Балкарский научный центр РАН», заслуженный деятель науки РФ, лауреат премии Совета Министров СССР Пётр Иванов, […]
Подробнее
5 февраля свою юбилейную дату отмечает ведущий научный сотрудник сектора новейшей истории Института гуманитарных исследований КБНЦ РАН, доктор исторических наук, Заслуженный работник культуры КБР, Почетный работник высшего профессионального образования РФ Тетуев Алим Инзрелович. Алим Инзрелович родился 5 февраля 1944 года в с. Верхняя Балкария Черекского района КБАССР. В 1971году с отличием окончил историко-филологический факультет КБГУ […]
Подробнее