11 сентября 2023 г. в КБНЦ РАН состоялось совещание по проблемам разработки искусственного интеллекта
Встречу посвятили обсуждению мультиагентных архитектур, применяемых для навигации и управления системой опрыскивания автономного робота для активной защиты растений. На данный момент разработчики реализовали дополнительные возможности для определения препятствий и построения маршрута среди посевов. Ведутся работы по усовершенствованию алгоритма распознавания препятствия и наведения включения системы опрыскивания.
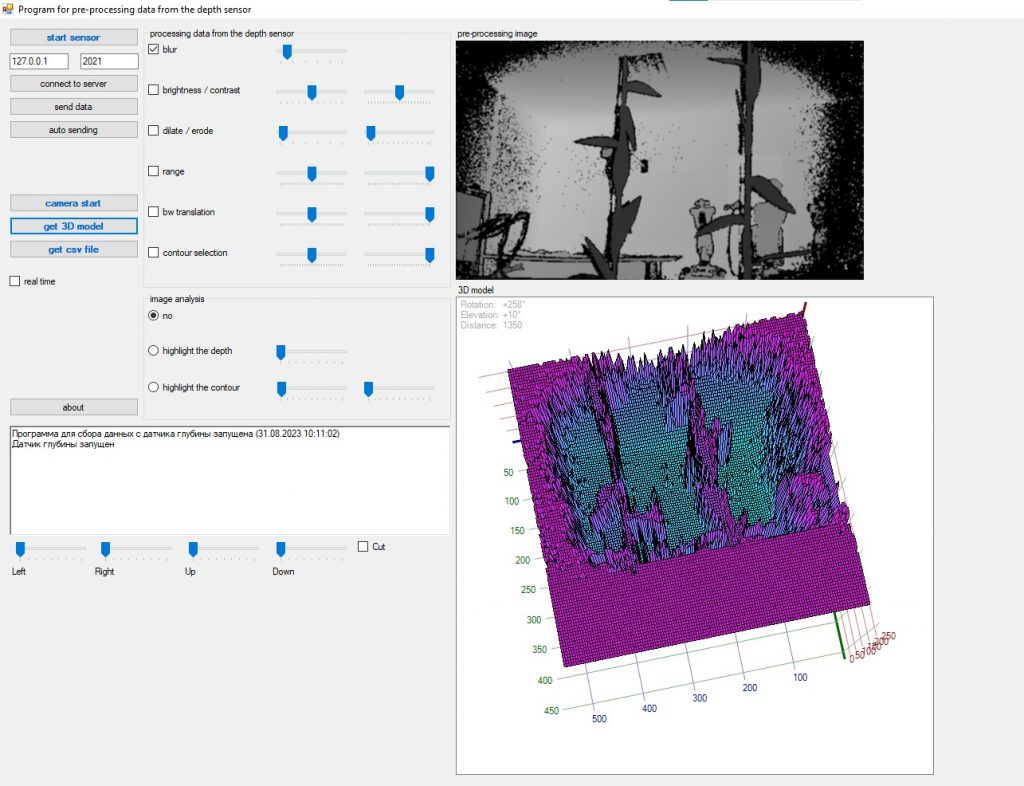
Кроме того, была продемонстрирована новая версия программы, позволяющая получать информацию о расположении объектов в окружающей среде в виде облака точек. На базе данных с сенсора глубины строится модель внешнего мира, состоящая из различных областей равной удаленности. В дальнейшем эта программа станет важной частью системы навигации и ориентации автономных роботов.
М.А. Абазоков, младший научный сотрудник лаборатории «Нейрокогнитивные автономные интеллектуальные системы» КБНЦ РАН, А.З. Апшев, стажер-исследователь лаборатории нейрокогнитивных автономных интеллектуальных систем ИИПРУ КБНЦ РАН, К.Ч. Бжихатлов, исполняющий обязанности директора ИИПРУ КБНЦ РАН, к.ф-м.н., А.И. Бозиев, младший научный сотрудник лаборатории «Нейрокогнитивные автономные интеллектуальные системы» КБНЦ РАН, С.М. Канкулов, младший научный сотрудник лаборатории «Нейрокогнитивные автономные интеллектуальные системы» КБНЦ РАН, Д.Г. Макоева, научный сотрудник лаборатории «Системы понимания синтеза речи» НИЦ «Интеллектуальные филологические системы» КБНЦ РАН к.ф.н., И.А. Мамбетов, младший научный сотрудник лаборатории «Маркетинг инновационных разработок» ИЦ КБНЦ РАН, З.В. Нагоев, генеральный директор КБНЦ РАН, О.В. Нагоева, научный сотрудник ИИПРУ КБНЦ РАН, И.А. Пшенокова, заведующая лабораторией «Интеллектуальные среды обитания» ИИПРУ КБНЦ РАН, к.ф.-м.н.